
An open source ROS package for kinematic control and motion planning for delta robots.
A C++ motion planning library using potential fields for obstacle avoidance and trajectory smoothing.
Simulating a pick and place task with the KUKA YouBot using a task-space feed-forward PID controller and Odometry.
A system that toasts bread using a Franka Emika Panda robot arm and an Intel Realsense Camera.
A robotic system that facilitates a game of poker with automated shuffling, dealing, and game management.
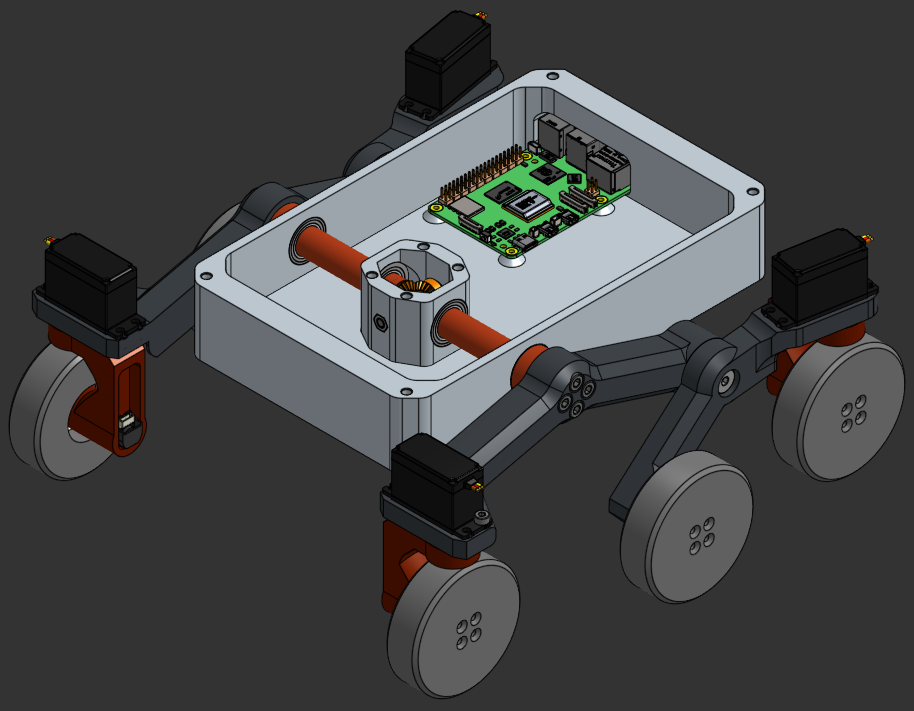
State estimation using a kalman filter for a 6-wheel Mars rover with a rocker-bogie suspension system.
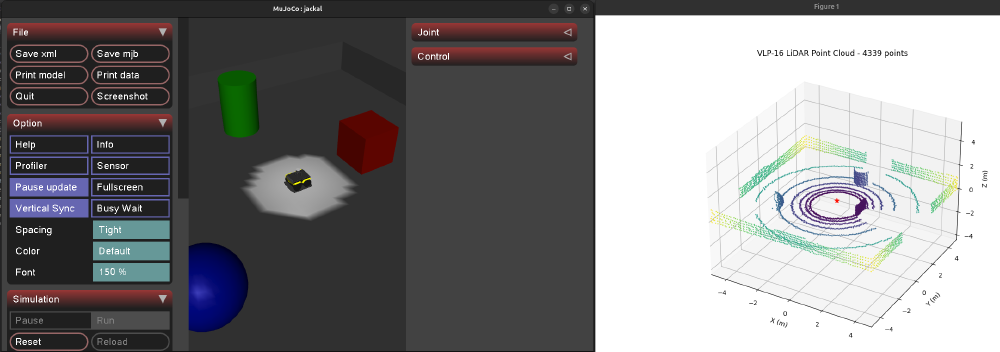
Teaching a Jackal mobile robot with a LiDaR to navigate using reinforcement learning with Mujoco.
Teaching the Unitree Go2 robot dog various locomotion tasks using reinforcement learning on the Genesis simulator.
A gantry robot equipped with a camera to autonomously play and teach chess to human opponents.
A 3D-printed robot arm kit for educational purposes. Coupled with a software package intended for students with little to no experience coding to use.
A simulation of a swarm of drones cleaning algal blooms in a lake using RRT and A* path planning.
A fast, lightweight graph retrieval-augmented generation tool for navigating codebases.

Mountain View, CA
A warehouse automation company that specializes in groceries, with zero labor pick and pack.
February 2026 - Present
October 2025 - February 2026

Remote (Wilmington, MA)
Warehouse automation company that builds autonomous mobile robots (AMRs) to improve warehouse efficiency and productivity.
June 2025 - September 2025

Boston, MA
Autonomous drone company building solutions for golf course maintenance, agriculture, Department of Defense, and more.
June 2023 - December 2023
Redwood City, CA
A warehouse automation company that specializes in groceries, with zero labor pick and pack.
July 2022 - December 2022

Marlborough, MA
A hardware and software company that specializes in diagnostic test equipment, software, and services for the electric power industry.
July 2021 - December 2021
2024-2025 Master of Science in RoboticsCourses Taken:
|
2019-2024 Bachelor of Science in Computer Engineering & Computer Science, Minor in RoboticsCourses Taken:
Extracurricular Activities:
|











